
一、📦 OpenClaw系统级安装
1.1 检查系统信息
# 查看系统版本
cat /etc/os-
出说明:
- x86_64 → 64位Intel/AMD处理器(大多数飞牛NAS)
- aarch64 → ARM64处理器(部分NAS型号
# 安装curl和wget(如果还没有)
apt install -y curl wget git
# 安装构建工具(某些npm包需要)
apt install -y build-essential python31.4 安装Node.js
OpenClaw 至少需要 Node.js 22 或更高版本。
用NodeSource官方源(推荐)
# 下载NodeSource安装脚本
# 根据你的系统选择:
# - Debian 11/12 使用 setup_22.x
# - Ubuntu 20.04/22.04/24.04 使用 setup_22.x
curl -fsSL https://deb.nodesource.com/setup_22.x | bash -
# 安装Node.js
apt install -y nodejs
# 验证安装
node -v # 应显示类似 v22.x.x
npm -v # 应显示类似 10.x.x二、📦 OpenClaw安装
# 安装
npm i -g openclaw2.1 现在做 3 个“黄金确认”(很重要)
请依次执行:
1️⃣ 看 openclaw 在哪
which openclaw
2️⃣ 看版本(确认能跑)
openclaw --version三、🚀 初始化配置
openclaw onboard #初始化配置到这个页面就开始初次运行配置了,下面就简单介绍下配置过程:
2.1 ⚠️ Security安全提示
选 YES,回车选择 QuickStart
2.2 🤖 模型配置(以Z.AI为例)
选择Z.AI(GLM 4.7) → 输入API_KEY → 选择模型
2.3 💬 即时通讯Bot核心配置 ⭐(以飞书为例)
飞书机器人的核心凭证(App ID/Secret)、权限、事件订阅均需在飞书开放平台配置,是集成的关键步骤,需严格按以下流程操作(国内版与国际版操作一致,仅平台地址不同)。
2.3.1 进入飞书开放平台
2.3.2 创建企业应用
登录后点击页面右上角创建企业应用;
填写基础信息:应用名称(如「OpenClaw AI 助手」)、应用描述(如「OpenClaw 飞书集成机器人」),选择应用图标(可选);
点击创建,进入应用配置主页面。
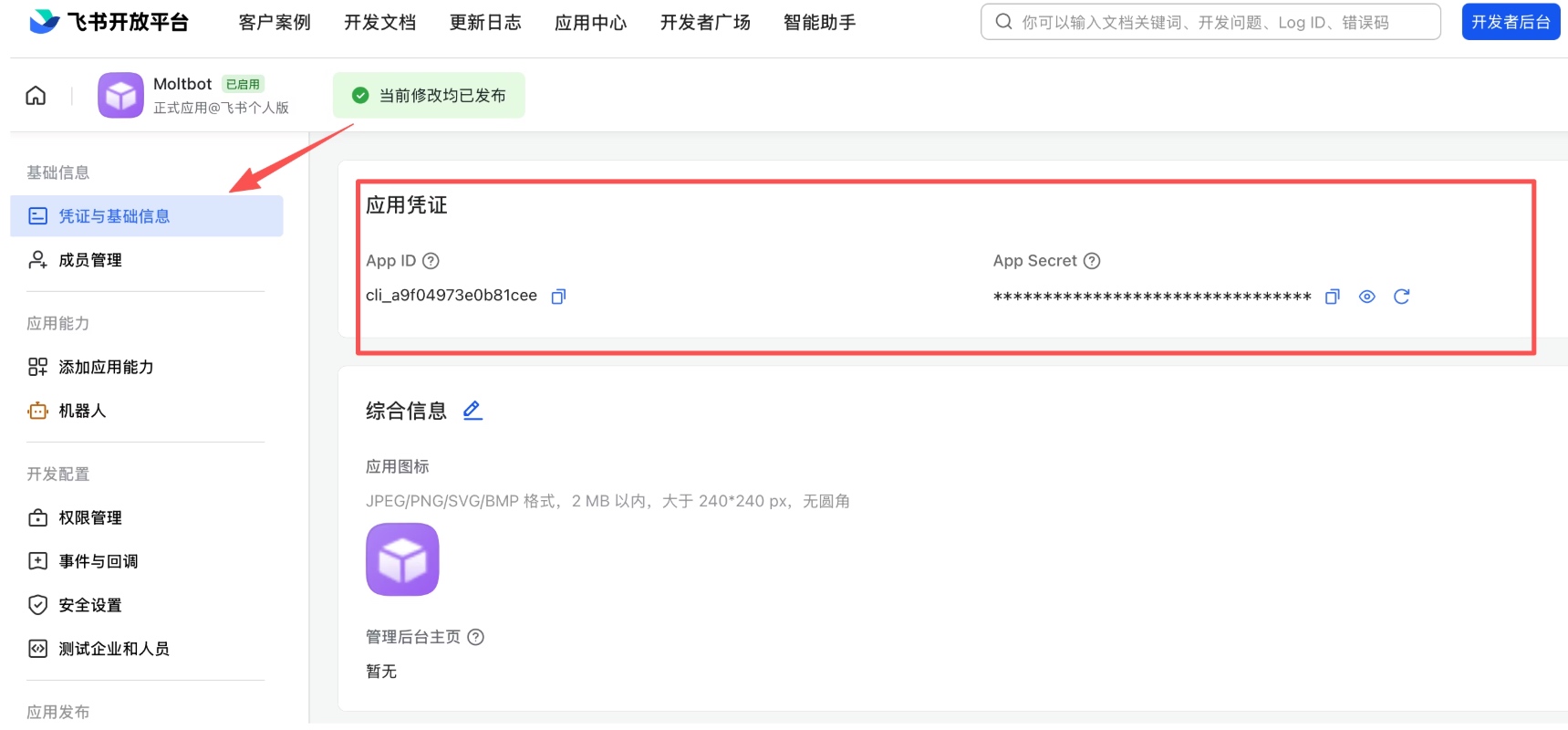
2.3.3 获取核心凭证(关键,妥善保管)
进入应用配置页的凭证与基础信息tab,复制以下两个核心参数(后续配置 OpenClaw 需用到):
App ID:格式为
cli_xxx,应用唯一标识;App Secret:应用密钥,切勿泄露给外部人员,丢失后需及时重置。
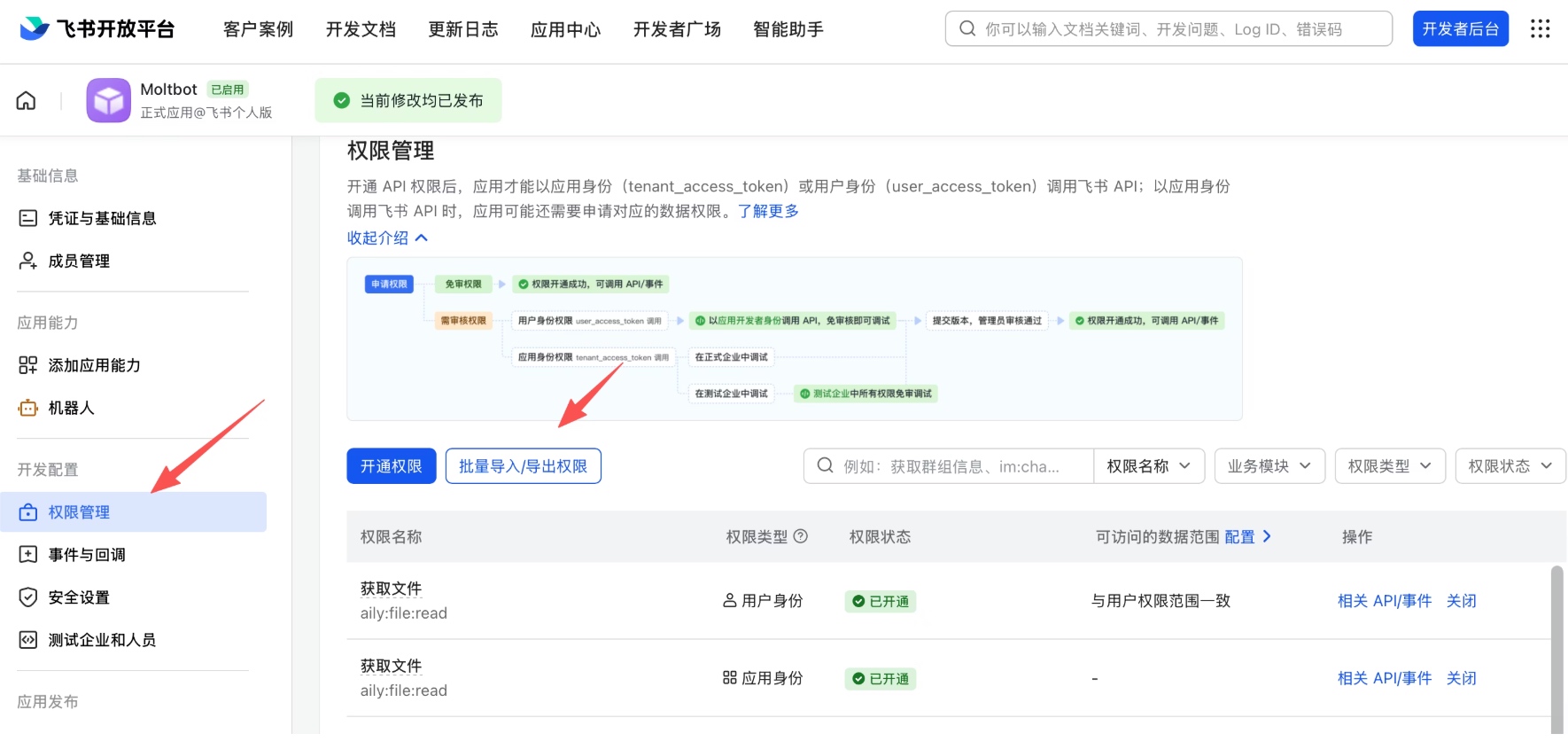
2.3.4 配置应用权限(批量导入,避免遗漏)
飞书机器人需要对应权限才能接收消息、发送回复、访问基础资源,采用批量导入方式配置最便捷:
进入应用配置页的权限管理tab,点击页面右侧批量导入;
粘贴以下 JSON 权限配置,点击导入,然后点击申请权限(企业内部应用通常自动通过):
{
"scopes": {
"tenant": [
"aily:file:read",
"aily:file:write",
"application:application.app_message_stats.overview:readonly",
"application:application:self_manage",
"application:bot.menu:write",
"contact:user.employee_id:readonly",
"corehr:file:download",
"event:ip_list",
"im:chat.access_event.bot_p2p_chat:read",
"im:chat.members:bot_access",
"im:message",
"im:message.group_at_msg:readonly",
"im:message.p2p_msg:readonly",
"im:message:readonly",
"im:message:send_as_bot",
"im:resource"
],
"user": [
"aily:file:read",
"aily:file:write",
"im:chat.access_event.bot_p2p_chat:read"
]
}
}
2.3.5 启用机器人功能
进入应用配置页的应用能力 > 机器人tab;
点击启用机器人功能,填写机器人名称(如「OpenClaw 助手」,飞书中展示的机器人昵称);
可按需上传机器人头像,保存配置。

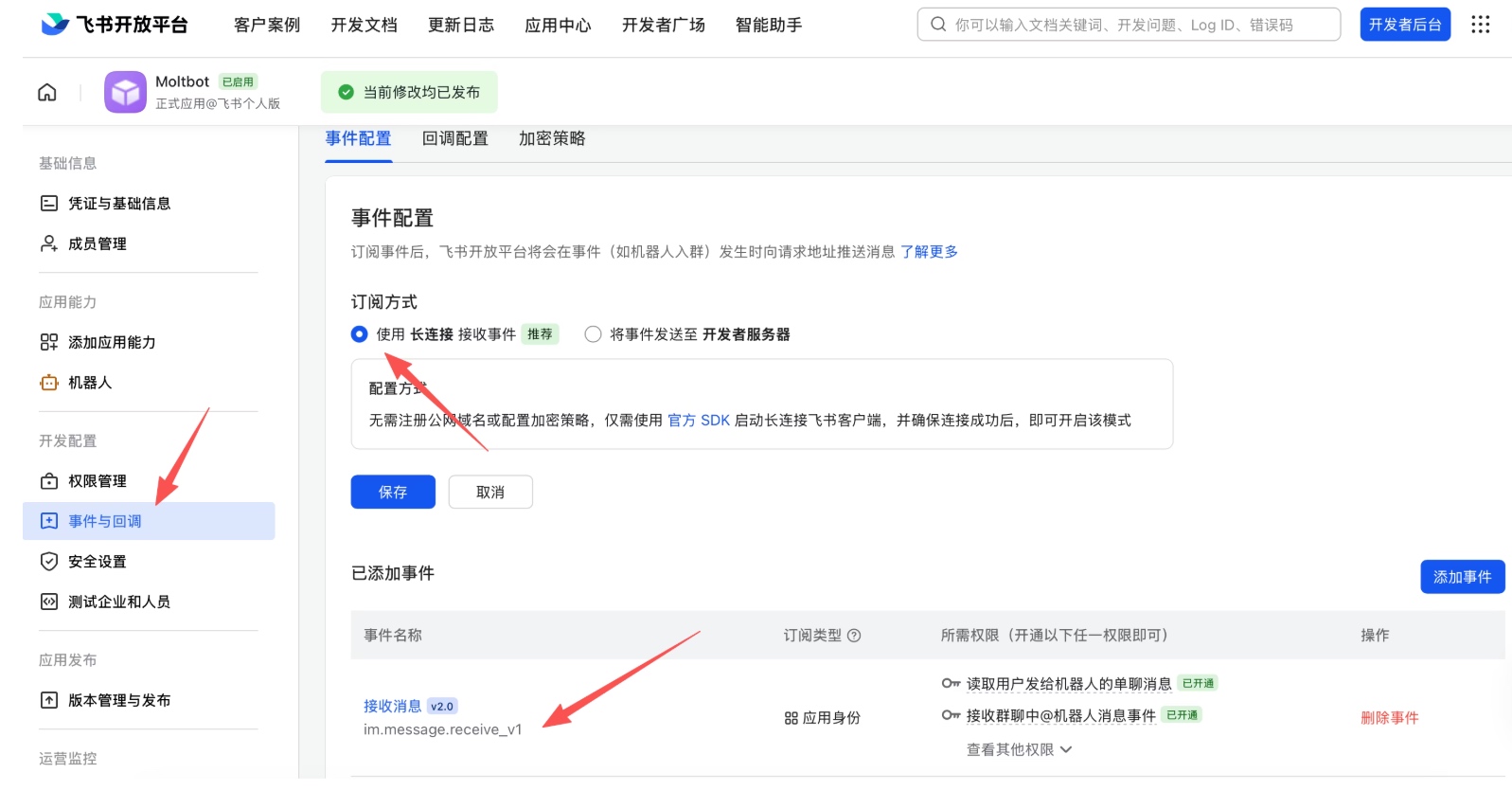
2.3.6 配置事件订阅(保证机器人能接收消息)
事件订阅是飞书机器人接收消息的核心配置,需选择WebSocket 长连接方式,与 OpenClaw 网关联动:
前置检查(必做,否则配置无效)
执行以下命令,确保 OpenClaw 飞书渠道已添加、网关正常运行:
# 添加飞书渠道(若未添加)
openclaw channels add
# 执行后选择「feishu」,按提示临时输入App ID/Secret即可(后续可修改)
# 检查网关状态(必须为 running)
openclaw gateway status
具体配置步骤
进入应用配置页的事件订阅tab;
消息接收方式选择使用长连接接收事件(WebSocket);
点击添加事件,搜索并选择
im.message.receive_v1(飞书消息接收核心事件,无此事件则机器人收不到消息);保存配置,飞书端事件订阅完成
2.3.7 发布应用(企业内部应用自动批准)
飞书企业应用需发布后才能在组织内使用,步骤如下:
进入应用配置页的版本管理与发布tab;
点击创建版本,填写版本描述(如「v1.0 OpenClaw 集成」),点击保存;
点击提交审核,企业内部应用通常自动批准,无需人工审核;
审核通过后,点击发布,应用正式生效。
2.3.8 飞书中找到机器人并发送测试消息
打开飞书,在工作台中搜索你的机器人名称(如「OpenClaw 助手」),进入机器人私信界面;
也可将机器人添加到任意群聊,在群中@机器人发送消息;
发送第一条测试消息(如「你好」),机器人会回复配对码(因默认私信策略为
pairing,未知用户需配对后才能正常使用)。
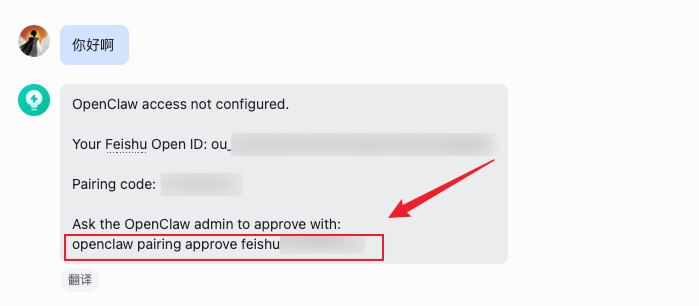
2.3.9 批准配对(解除私信限制)
终端中执行以下命令,批准飞书机器人的配对码,完成后即可正常对话:
# 核心命令:openclaw pairing approve 渠道名 配对码
openclaw pairing approve feishu 你的配对码

此时即可正常与机器人对话、调用 AI 能力。
2.3.10 机器人内置命令(飞书中直接发送)
在飞书私信/群聊中@机器人,发送以下命令,可实现会话管理、模型切换等功能:
/status:查看 OpenClaw 机器人当前状态(网关是否运行、模型版本等);/reset:重置当前会话(清除历史对话记录,重新开始对话);/model:查看当前使用的 AI 模型,也可按需切换模型(如/model claude-opus)。
2.3.11 私信权限控制(dmPolicy)
通过修改 OpenClaw 飞书渠道配置中的 dmPolicy,可控制机器人的私信访问权限,支持3种策略:
pairing(默认):未知用户发送消息后收到配对码,管理员批准后可正常使用,适合企业内部管控;open:允许所有飞书组织内用户发送私信,无需配对,适合开放场景;allowlist:仅allowFrom配置中的飞书用户可发送私信,其余用户无法访问,适合严格管控场景。
配置示例(allowlist 模式)
"feishu": {
"enabled": true,
"dmPolicy": "allowlist",
"allowFrom": ["ou_xxxx1", "ou_xxxx2"], // 飞书用户Open ID
"accounts": {
"main": {
"appId": "cli_xxx",
"appSecret": "xxx"
}
}
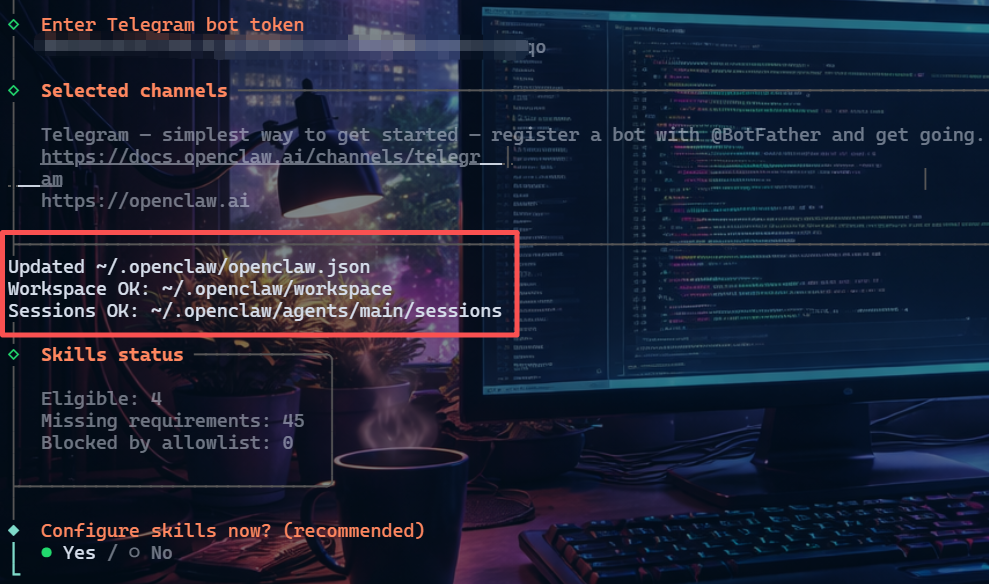
}2.4 跳过skill配置,截图保存红框配置文件路径,后续都可以打开文件进行配置
2.5 启动命令
#这是临时启动命令,一般要写入到自启动命令中,使用systemctl start openclaw-gateway
openclaw gateway run2.6 新版权限
新版权限默认收紧了,需要设置成full
openclaw config set tools.profile full四、常用管理命令
日常使用中,可通过以下命令管理 OpenClaw 飞书插件与网关,高效排查问题、调整配置:
手动创建 systemd 服务
使用 root 权限创建一个新的服务文件。
cat > /etc/systemd/system/openclaw-gateway.service << 'EOF'
[Unit]
Description=OpenClaw Gateway
After=network-online.target
Wants=network-online.target
[Service]
Type=simple
WorkingDirectory=/root/.openclaw
ExecStart=/usr/bin/openclaw gateway --force
Restart=always
RestartSec=2
[Install]
WantedBy=multi-user.target
EOF请注意:
ExecStart行指定了 OpenClaw 可执行文件的路径。如果你的openclaw命令不在/usr/bin/下,请先通过which openclaw命令查找其正确路径并替换。该配置会在网络就绪后启动服务,并在崩溃时自动重启(
Restart=always)。
重新加载 systemd 并启用服务:
bash
# 重新加载 systemd 配置
systemctl daemon-reload
# 启用开机自启并立即启动服务
systemctl enable --now openclaw-gateway.service验证与管理
无论使用哪种方法,设置完成后,你都可以通过以下命令来管理 OpenClaw 服务:
查看状态:
systemctl status openclaw-gateway.service重启服务:
systemctl restart openclaw-gateway.service(修改配置文件后常用)停止服务:
systemctl stop openclaw-gateway.service查看实时日志:
journalctl -u openclaw-gateway.service -f
设置完成后,你可以重启一下系统,然后通过 systemctl status 或 openclaw status 来验证 OpenClaw 是否已自动在后台运行。
插件管理
# 查看飞书插件状态
openclaw plugins list
# 卸载飞书插件(如需重新安装)
openclaw plugins remove @openclaw/feishu
# 重新加载飞书插件(无需重启网关)
openclaw plugins load feishu
网关管理
# 查看网关实时状态
openclaw gateway status
# 重启网关(配置修改后必做)
openclaw gateway restart
# 停止网关
openclaw gateway stop
日志查看(故障排查核心)
# 实时查看所有日志(含飞书消息、网关运行、插件加载)
openclaw logs --follow
# 仅查看飞书渠道日志(精准排查机器人问题)
openclaw logs --follow channels.feishu
配对管理
# 批准配对码
openclaw pairing approve feishu <配对码>
# 查看所有待批准配对
openclaw pairing list
# 拒绝配对码
openclaw pairing reject feishu <配对码>
五、常见故障排查
若飞书机器人无响应、收不到消息或回复异常,按以下步骤排查,90%的问题可快速解决:
问题1:机器人不接收任何消息,飞书中发送无响应
排查步骤
检查 OpenClaw 网关是否运行:
openclaw gateway status(必须为running);检查飞书事件订阅是否配置
im.message.receive_v1事件,且消息接收方式为 WebSocket;检查飞书应用是否已发布并批准:飞书开放平台「版本管理与发布」是否为「已发布」状态;
检查飞书应用权限是否全部通过:飞书开放平台「权限管理」是否无未通过的权限;
查看实时日志:
openclaw logs --follow channels.feishu,查看是否有连接错误、凭证错误。
问题2:机器人能接收消息,但提示「配对码」,批准后仍无响应
排查步骤
检查配对码是否输入正确:
openclaw pairing list查看待批准配对码,确认无输错;检查飞书渠道配置是否启用:
openclaw status查看channels.feishu.enabled是否为true;重启网关:
openclaw gateway restart,重新批准配对码。
问题3:群聊中@机器人无响应,私信正常
排查步骤
检查群聊策略:查看
openclaw.json中groupPolicy是否为disabled(禁用则无响应),改为open即可;检查是否添加机器人到群聊:飞书群聊中需先将机器人「添加到群」,否则无法接收@消息;
检查群聊允许列表:若
groupPolicy为allowlist,确认发送消息的用户在groupAllowFrom中。
问题4:提示「App ID/Secret 错误」,日志显示认证失败
排查步骤
核对飞书凭证:飞书开放平台「凭证与基础信息」中的 App ID/Secret 与 OpenClaw 配置一致,无空格、输错;
检查飞书应用是否为「企业应用」:个人应用无法使用机器人功能,需重新创建企业应用;
重置 App Secret:若怀疑 Secret 泄露,在飞书开放平台重置 Secret,重新更新 OpenClaw 配置。
六、删除OpenClaw
# 1、如果使用的是系统级服务
systemctl stop openclaw-gateway.service
# 2、删除服务文件(如果是手动创建的)
rm -f /etc/systemd/system/openclaw-gateway.service
# 3、重新加载 systemd
systemctl daemon-reload
# 4、卸载npm全局包
npm uninstall -g openclaw
# 如果卸载全全局包的命令失败,查看全局安装的 openclaw 包位置
npm list -g --depth=0 | grep openclaw
# 然后强制删除
rm -rf /usr/lib/node_modules/openclaw
rm -f /usr/bin/openclaw
# 5、删除用户配置目录(包含所有插件数据、配对信息等)
rm -rf /root/.openclaw
# 如果还有其他位置的配置(如系统级配置)
rm -rf /etc/openclaw # 如果存在
# 6、删除可能存在的日志文件
rm -rf /var/log/openclaw # 如果存在
rm -rf /root/.cache/openclaw # 如果存在
#清理 npm 全局缓存
npm cache clean --force